Разработчики из Северо-Западного университета США представили первый материал, который трансформируется в робота. Он обладает функциями мягкого робота. Габариты робота – около одного сантиметра. Внешне он напоминает осьминога с четырьмя щупальцами. Устройство на 90% состоит из гидрогеля.
Материал перемещается со скоростью человека, подбирает и транспортирует грузы, взбирается на уклоны. Робот активируется световыми лучами и движется в направлении внешнего вращающегося магнитного поля без участия сложного оборудования или электричества.
Механизм точного движения и маневренности – в его заполненной гелем структуре и встроенном каркасе из выровненных ферромагнитных никелевых нитей. Мягкий компонент структуры представляет собой сеть, построенную на молекулярном уровне. Его элементы реагируют на свет, удерживают или вытесняют воду внутри, обладают необходимой жесткостью, чтобы оперативно реагировать на магнитные поля.
Разработчики применили методы химического синтеза. С их помощью запрограммировали молекулы внутри гидрогеля реакции на свет. Под воздействием света робот «отталкивает» молекулы воды и приходит в движении.
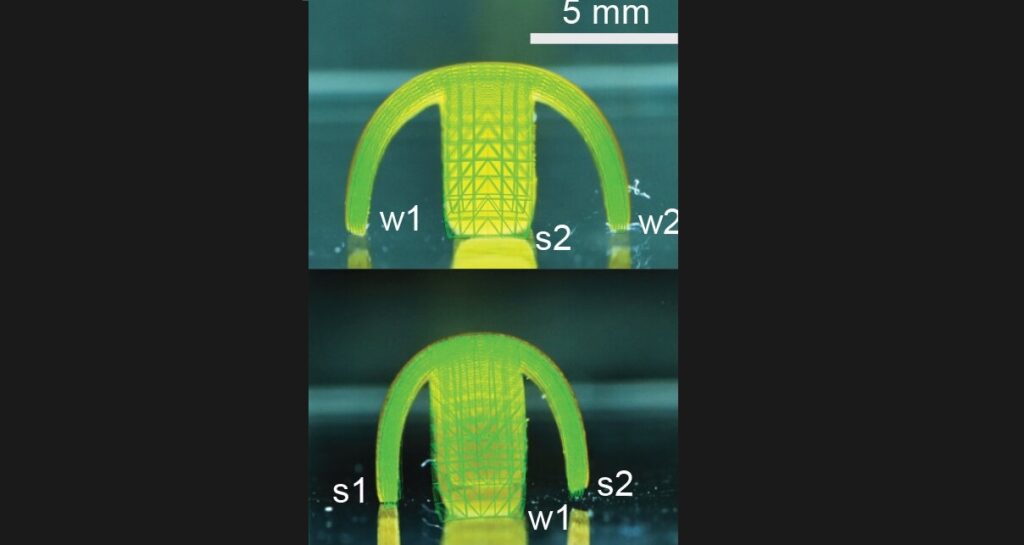
Такая реакция заставляет робота «оживать», изменяя положение из плоского в «стоячее». Ученые обнаружили, что процесс изгибания помогает роботу быстро реагировать на вращающиеся магнитные поля, а в итоге – быстро передвигаться. При выключении света молекулы «переходят» в исходное состояние. В итоге робот становится плоским материалом. Циклы активности можно повторять с помощью светодиодов.
Вращающееся поле можно запрограммировать, чтобы робот двигался по заданной траектории.
Движения устройств можно настроить таким образом, чтобы они помогали катализировать химические реакции и затем выкачивали ценные продукты. Если уменьшить размеры робота, то на молекулярном уровне он сможет распознавать и удалять нежелательные частицы в определенных средах, а также точно доставлять препараты или клетки в ткани пациентов.
«Мы разработали мягкие материалы с молекулярным интеллектом. Такие роботы смогут работать в ограниченном пространстве, под водой или под землей. Мы можем изменить форму и добавить конечности синтаксическим конструкциям, а также придать им новые степени подвижности. Это делает их универсальными и легко поддающимися решению различных задач», – рассказал Сэмюэл И. Стапп ( Samuel I. Stupp), руководитель экспериментальной части исследования.