Ученые из Калифорнийского университета (Сан-Диего) разработали гибкие опоры конечностей, задача которых – увеличить скорость движения на 40% на неровных поверхностях (галька, опилки и т.д.). Решение поможет в проведении поисково-спасательных работ и исследованиях космоса.
Конструкция опор – это гибкие сферы из латексной мембраны, наполненные кофейной гущей. С ее помощью роботы передвигаются быстрее и остаются устойчивыми благодаря механизму granular jamming (заклинивание гранулированного материала).
Гранулированная среда (кофейной гуща) временно создает форму под давлением. Поэтому каждая конечность способна сформировать жесткое, индивидуальное сцепление с неровной поверхностью при соприкосновении с ней. Этот процесс может происходить пассивно (например, когда вес робота спрессовывает содержимое сфер) или активно (когда используется вакуумный насос для удаления воздуха).
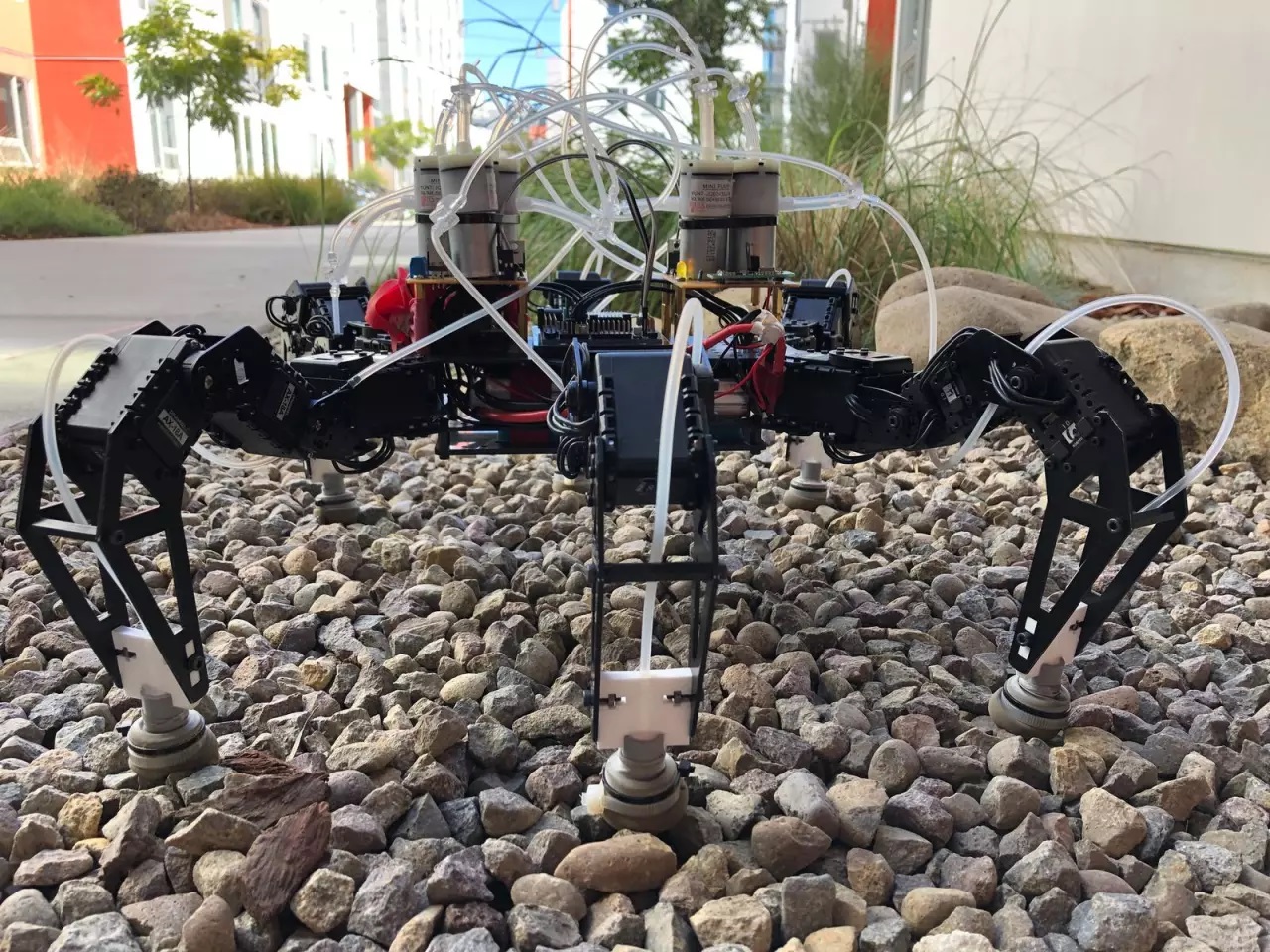
Ученые установили решение на серийно выпускаемом роботе-гексаподе и дополнили его разработанной бортовой системой, генерирующей отрицательное давление (для контроля заклинивания конечностей) и положительное давление (освобождает механизмы для нового шага).
Исследователи протестировали робота на ровных поверхностях, гальке, древесных щепках и опилках, с ногами и без них. Использование мягких сфер в качестве опоры конечностей обеспечило большую стабильность, а также увеличило скорость робота, особенно на неровной и наклонной местности.
Ученые планируют:
– интегрировать мягкие датчики в нижнюю часть конечностей, чтобы электронная панель управления определяла тип поверхности и движения (активный или пассивный);
– продолжить работу над улучшением алгоритмов проектирования и управления, чтобы сделать опоры более эффективными.
источник фото: UC San Diego