Небольшие дроны-квадрокоптеры, или микро-летательные аппараты (MAV), имеют непродолжительное время автономной работы. Чтобы сохранить заряда их аккумулятора и поставить устройства на паузу, инженеры из Университета штата Колорадо разработали устройство сродни «прищепки». Оно устанавливается сверху дронов разных производителей.
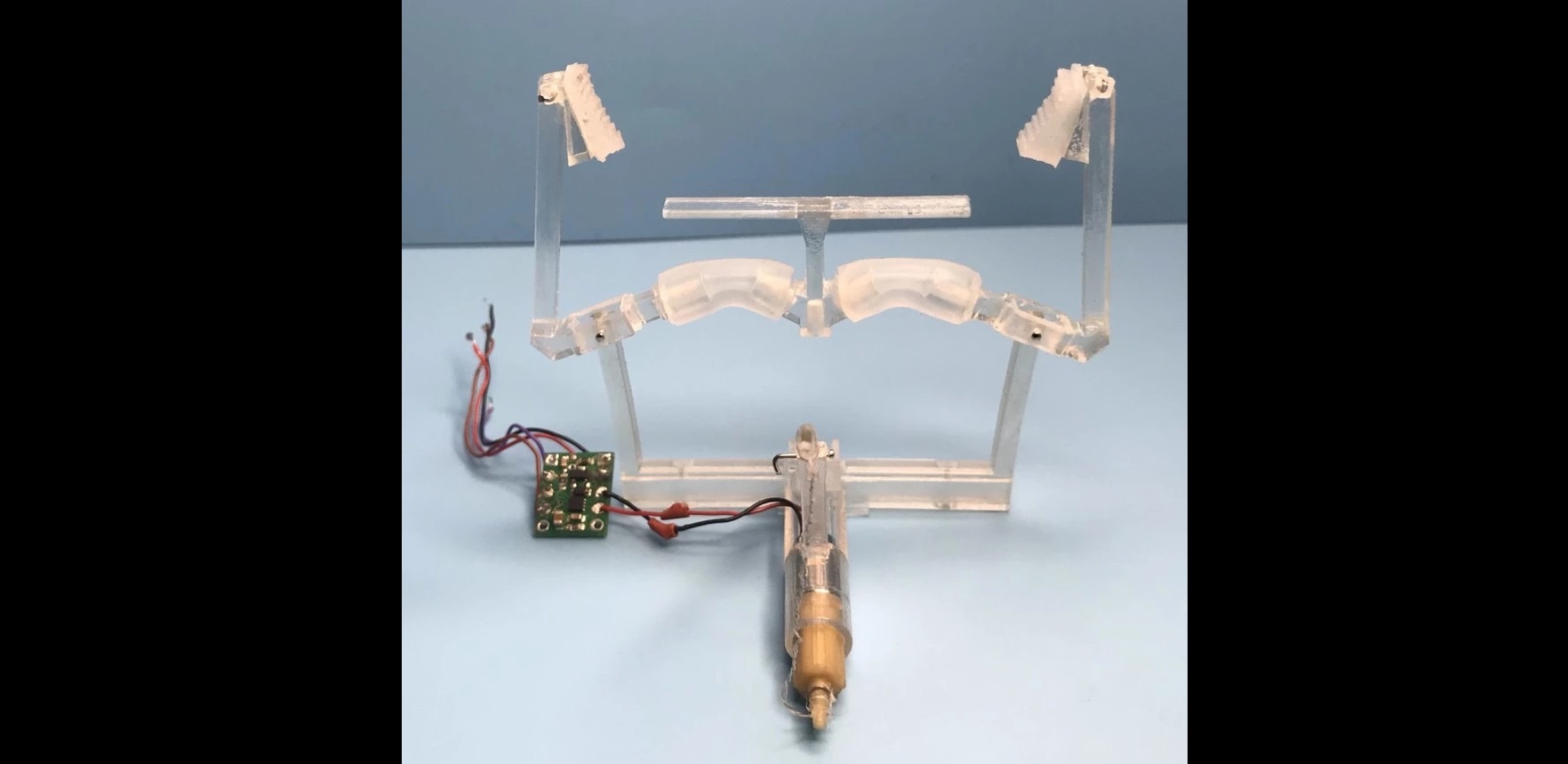
Конструкция приспособления состоит из вертикальной плунжерной втулки в центре, которая механически соединена с двумя поднятыми по диагонали складными рычагами. На верхнем конце каждого рычага расположена обращенная внутрь накладка для захвата.

Когда MAV подлетает к нижней стороне горизонтально расположенного объекта (ветки дерева, трубы или перил) сила удара толкает втулку вниз. Это, в свою очередь, инициирует складывание рычагов внутрь, сжимание объекта и фиксацию дрона на месте. Затем двигатели можно отключить до нужного момента.
В зависимости от диаметра объекта, обхват происходит либо полностью, либо механизм сжимает его накладками. Сама конструкция захвата полностью механическая и работает без электричества. Но для возобновления полета неообходимо небольшое усилие, чтобы развести рычаги в стороны и возобновить полет.
«Такой метод проектирования можно также применить к крупногабаритным MAV для производства захвата в полете», — отметил один из разработчиков, доктор Цзяньго Чжао (Jianguo Zhao).
Устройство описано в научной статье в журнале IEEE Explore.