


Ученые Калифорнийского университета (Сан-Диего) разработали доступную и простую систему для мониторинга расположения гибких хирургических роботов внутри организма человека.
Роботы Continuum доказали эффективность при работе в неблагоприятных условиях. Continuum безопаснее, чем инструменты хирурга, рассказала Таня Моримото (Tania Morimoto), профессор машиностроения Школы инженерии Джейкобса (Сан-Диего).
По ее словам, использование гибких устройств осложнено необходимостью контроля изменения из формы и положения внутри тела человека. Разработанная система упрощает управление.
Ученые встроили магнит в «головную» часть гибкого робота. Магнит поможет обследовать чувствительные участки (кровеносные сосуды и артериальные каналы мозга и т.д.). Метод локализации магнитов, технически схожий с GPS, позволил создать компьютерную модель и находить робота.
Определение местоположения опирается на силу магнитного поля вокруг магнита робота. Измерения поля осуществлялись при помощи четырех сенсоров, которые аккуратно расположены вокруг области тела, где проводится хирургическое вмешательство. По мере увеличения силы магнитного поля ученым удалось точно локализовать головную часть устройства.
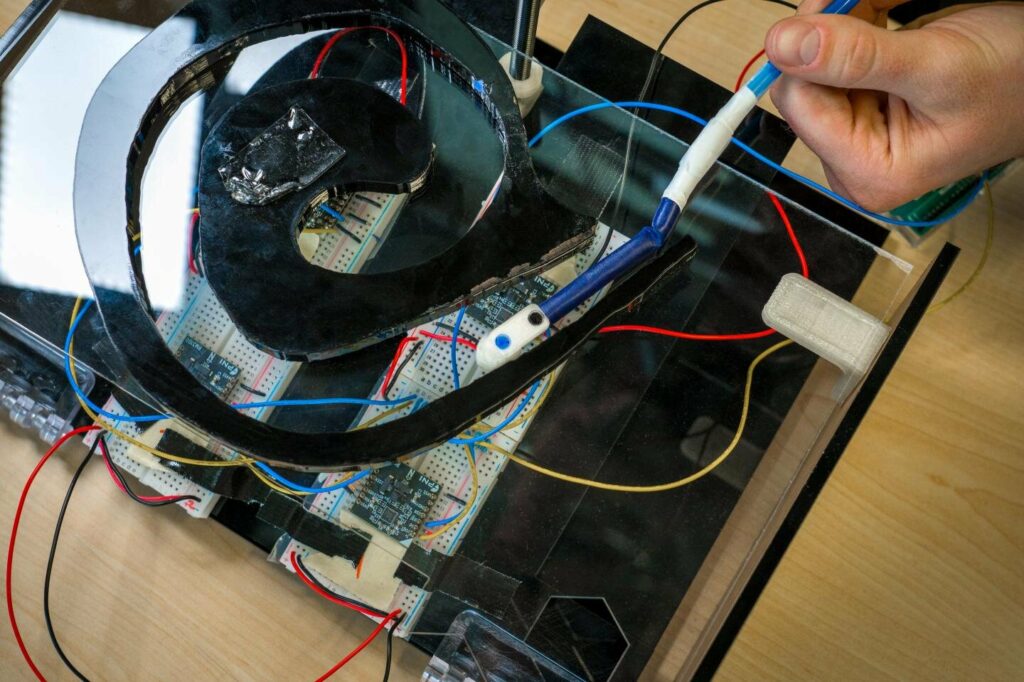
Фото: David Baillot/University of California San Diego